



「ナベさんの気ままなラジコン日記」(417)~サーボの消費電力を測定するその②~ (2017/11/10)
ナベさんのプロフィール(過去の日記はこちら)
以前、「BECは何アンペア必要なんだろうか?」という素朴な疑問から、「ナベさんのきままなラジコン日記」の第93回でサーボの消費電力を測りましたが、あの時は部屋の中でしたので機体は静止した状態での計測でした。
当然のことながら読者の皆様から
「飛行中は各舵に空気が当たるから、もっと電流が流れるでしょ?!」
というツッコミを頂いたので、いつかはサーボに負荷を掛けた実験を行いたいと考えていました。
(ほとんど言い訳モード!^^;)
そのいつかが、ついにやって来ました!
という訳で、今週はサーボに負荷を掛けた状態での消費電力について実験をしたいと思います。

今回実験に使用するサーボはこれ!
JRのデジタルサーボDS3201と同じくJRのアナログサーボNES-321です。
「また随分古いサーボを持ち出してきて!」
と、ツッコミをいただきそうなのですが、手持ちのストックの中にはこんなのしかなかったので勘弁してください。
一応スペックですが
DS3201(デジタルサーボ) トルク4Kg*cm スピード0.22sec/60s° 重量26g
NES-321(アナログサーボ) トルク2.3Kg*cm スピード0.23sec/60s° 重量22g
となっています。

サーボホーンに直接2.3Kgとか4Kgの重りを付けるのもどうかと思いますので、ベニヤ板をカットしてホーンに取り付けるアームを製作します。
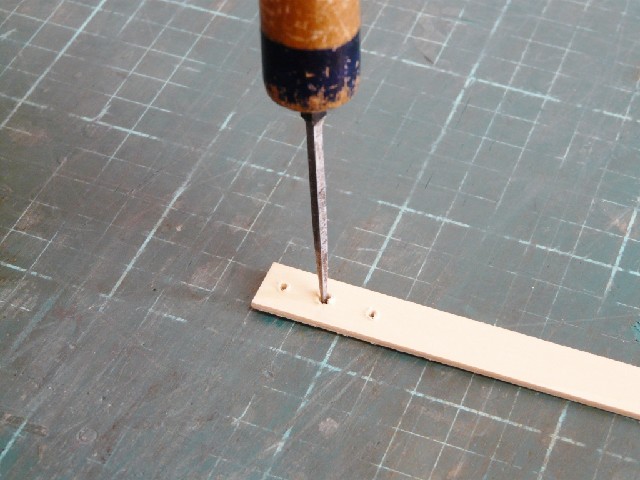
次にサーボホーンに取り付けるねじ穴を開けていきます。

真ん中の穴はサーボに取付けるネジ穴ですから、特に大きく開けます。

今回はサーボにかなり負荷を掛けますから、円形のサーボホーンにタッピングビスで取付けることにします。

裏返してみますと、こんな感じです。
幸いなことにビスはサーボケースに当たりませんでした。

アームをサーボに固定してみます。
おおっ!
なんとなくカッコいい!
アカデミックな実験らしくなってきました!
(自己満足)

次はバラストです。
適当な重りが無かったので、今回はこれ!
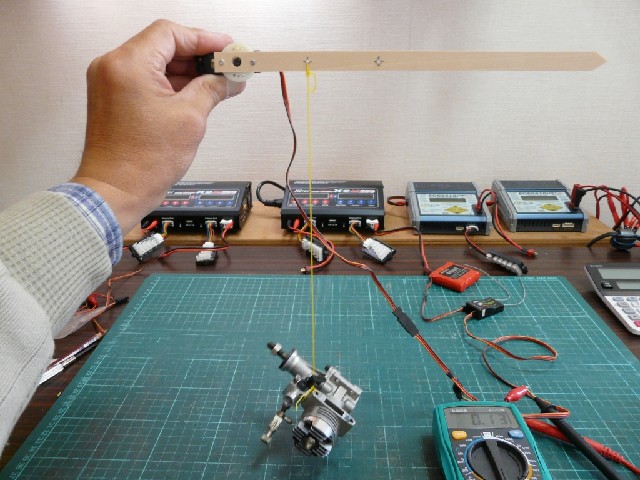
2サイクルエンジン ENYAのSS25、重量は223gです。
もう~ENYAファンが見たら怒られそうです。

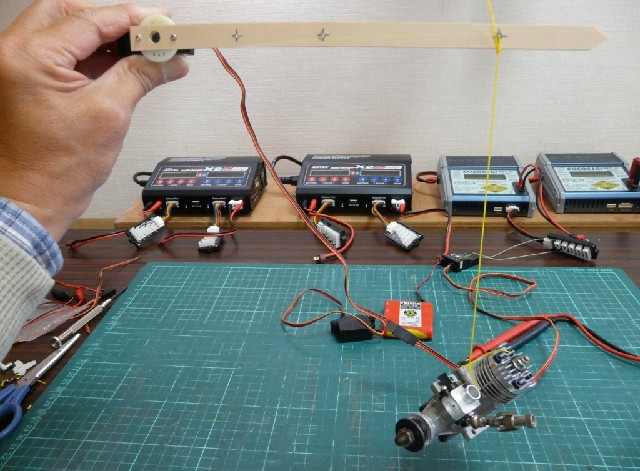
実験装置の全体像はこんな感じです。
受信機とサーボの間にテスターを挿入してサーボの消費電流を測ります。

サーボを固定するグランパーが無かったので、手持ちで行うことにしました。
も~素人実験ですね!
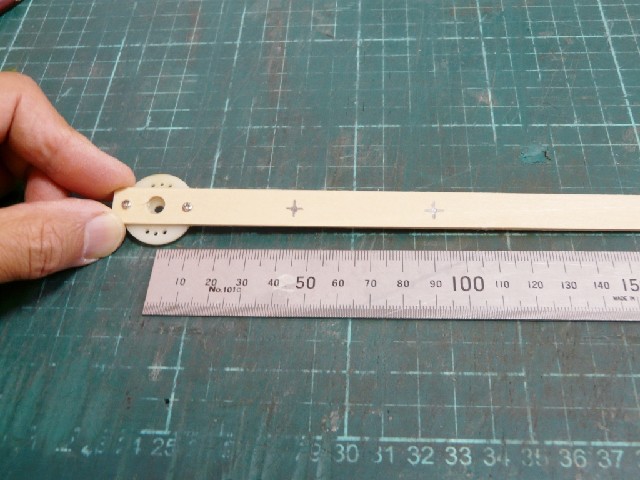
まずはアームのバラストを取付ける位置に印をします。
1Kg*cmのトルクは1,000g*cmですから、これを223gのENYAエンジンで再現するには
モーメントの長さをLcmとすると
1,000g×1cm=223g×Lcm
L=1,000/223
=4.48cm
となりました。
よって、1Kg*cmは4.48cmのところに、2Kg*cmはその倍の8.97cmのところに穴を開ければ良いことになります。
さて、それでは実験です。
サーボに負荷を掛けた状態でスティックを動かしながら電流の最高値を読みます。
最初はNES-321から。
1Kg*cmの負荷を掛けたところサーボは正常に動きました。
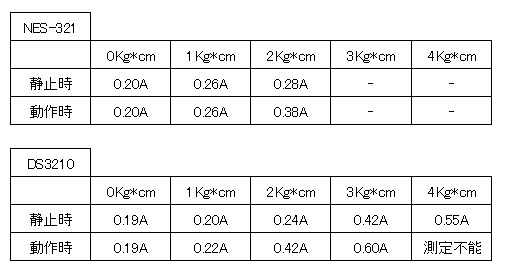
サーボが静止している時も動作している時も0.26Aと同じ数値を示しています。
次に2Kg*cmの負荷を掛けるとサーボの動きはかなり遅くなってきます。
電流値はサーボ静止状態で0.28A、動作状態で0.38Aと1Kg*cmの負荷と比較すると増加しています。

次にDS-3201用に4Kg*cmの穴を開けます。
穴の位置は4.48cm×4=17.92cmになります。
今度はDS-3201を使って実験を続けます。
4Kg*cmのトルクは予想以上に強くてアームが曲がっているようにも見えます。
サーボがブルブルと振動し、熱を持ち出したので実験は中断しました。

1Kg*cm、2Kg*cm、4Kg*cmと負荷を掛けていったのだから、ついでに3Kg*cmもやってみようと思い、急遽3Kg*cmの穴を開けて実験をすることにしました。
〔今回の実験で分かったこと〕
○レギュレーターを選ぶ場合、サーボの消費電力は余裕を見てもアナログサーボで1個0.7A、デジタルサーボでも1個1Aで換算できる。
○サーボに負荷を掛けていくとスペックの50%あたりから消費電力の増加率が上昇する。
○サーボに負荷を掛けていくとスペックの70%あたりから動作速度が遅くなる。
〔所感〕
いささか古いサーボで実験をしたのでデータの信頼性はどうなのか?という問題もありますが、アナログサーボの場合、徐々に負荷を掛けていくと動作速度がなめらかに低下するので、飛行中でもサーボのトルク不足が分かりやすいです。一方、デジタルサーボは律儀ですから、サーボが頑張って動こうとするので、パイロットがトルク不足に気付く前にサーボが振動したり発熱する恐れがあるので、高性能である一方、管理は慎重に行うべきでしょう。
私見ですが、サーボのスペックの50%以下で使用した方が安心で安全に思いました。
なお、実験の詳しいデーターは下記にまとめておきました。

ご感想送信フォームはこちらをクリックして下さい。
最新の日記はこちら
(過去の日記はこちら)

